The focus of this Ph.D. is given by the new area that has emerged: the rise of the automated vehicle. Although the concept is an old one that can be found in utopic/dystopic literature, early attempts to create driverless vehicles have existed before but only with the recent project sponsored by DARPA (Defense Advanced Research Projects Agency) [1], the driverless car has stepped closer towards becoming a reality. A driverless car is an automated vehicle [2] capable of carrying out the transportation and mobility capabilities of a traditional car. It is able to achieve this by using a “sense-plan-act” design [3]. Appropriate levels of trust are an integral part in the successful deployment of such vehicles, especially since the trust of a user in the automated system is crucial for its use, disuse or abuse [4]. Although some of the technologies that are incorporated into driverless cars have already existed in other fields such as aviation (autopilot), the driver-vehicle-environment system has specific characteristics and consequently, knowledge from other areas does not necessarily transfer.
The main research focus of this project is given by the gaps of knowledge that exist when talking about ways in which trust is affected by the different factors and technologies that are incorporated into a highly automated vehicle, as well as calibrating the trust of the users in the system. It is an area of research that has emerged with the paradigm shift in which the vehicle, that used to be seen as a tool, has morphed into an intelligent agent [5] in which users have to place their trust, in situations that involve personal risk. Therefore, the intended users of driverless cars have to place trust in the reliability, situation awareness and decision making of the system, among other factors. The specific area of research is addressed to the levels 3-4 of driving automation [6] and is highlighted in the picture presented below.
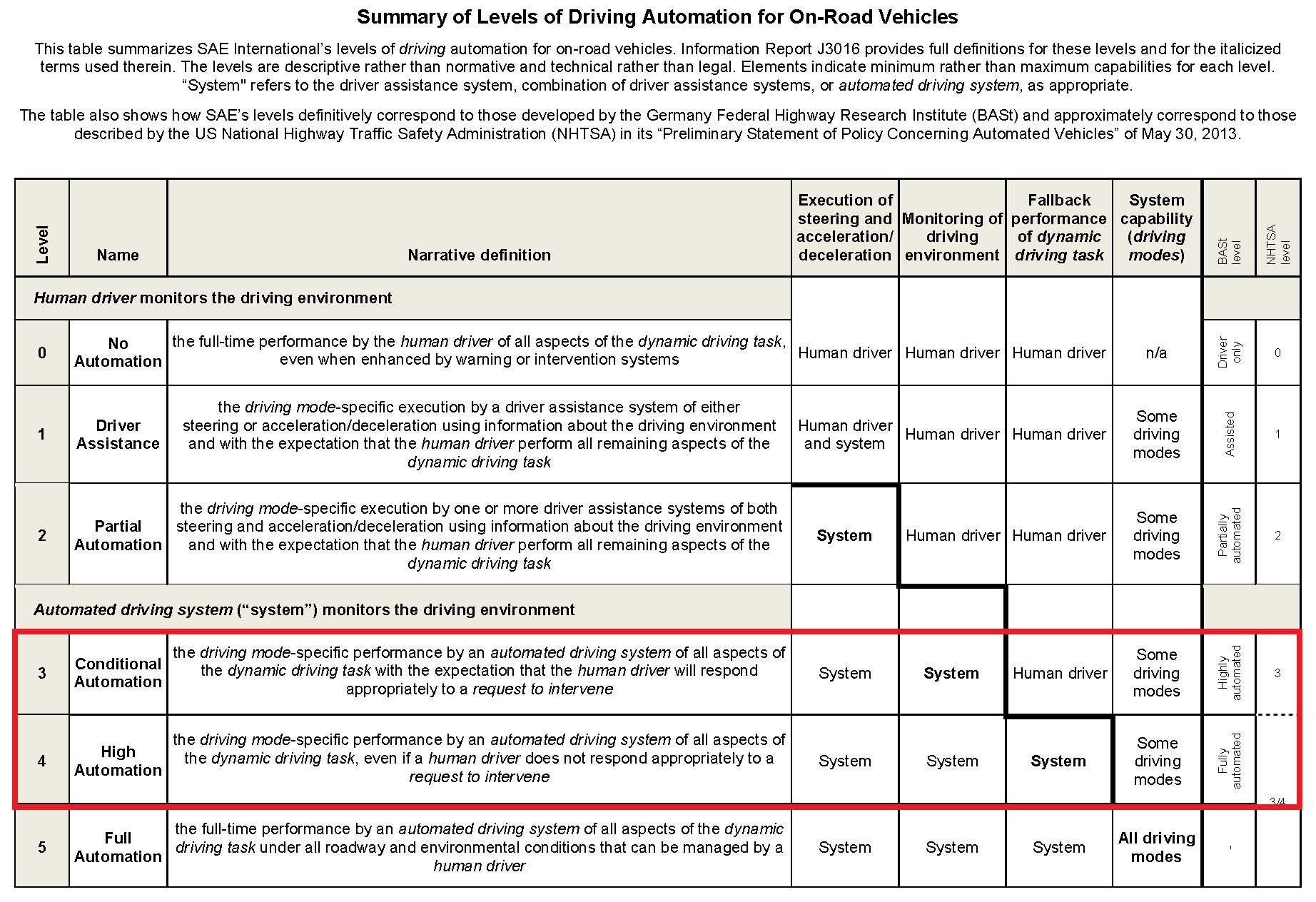
SAE Levels of Driving Automation
In order to carry out the proposed research, a mixed method approach has been adopted. Given the complexities of the research project, it is envisioned that the qualitative data will provide a rich understanding of the issues involved, while the quantitative data will inform the engineering design. The initial stage of the research involved an extensive literature review as well as an exploratory survey, which was later on followed by conducting interviews with experts from the fields of Human Factors and Geospatial Sciences. The next steps in the project are the completion of the observational studies that are being conducted in Milton Keynes as well as the final study that involves the testing of the HMI that has been developed.
One of the main aims of the research is to develop and test an HMI design that would allow users to calibrate their trust in the Automated Vehicle, by providing visual feedback of the Situation Awareness of the Vehicle (SAV).
This author is supported by the Horizon Centre for Doctoral Training at the University of Nottingham (RCUK Grant No. EP/G037574/1) and by the RCUK’s Horizon Digital Economy Research Institute (RCUK Grant No. EP/G065802/1).